
- Order number: TR-KIT-WXT-MX28
- Manufacturer product ID: TR-KIT-WXT-MX28
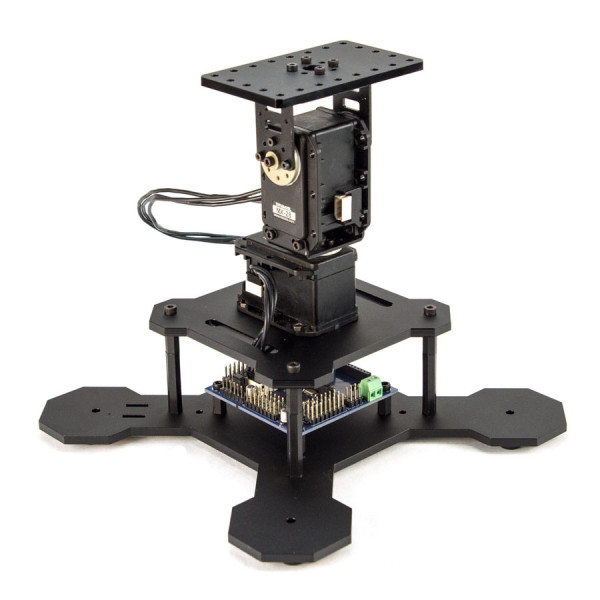
The WidowX Robot Turret is a super high performance Pan & Tilt platform for experimenters, roboticists, and hobbyists, making it easy to get started in the exciting field of physical computing! This easy to build kit is based around the exclusive ArbotiX Robocontroller and the new MX-28T Dynamixel Actuators, granting it some serious payload and speed capabilities. It includes everything needed to build a high performance, fully programmable, Arduino-compatible Pan & Tilt platform. Add webcams, lasers, airsoft guns, a variety of sensors to the available I/O, Xbee wireless link to a PC, PWM Hobby Servos, up to two small DC motors, and additional Dynamixel Actuators to customize your project! The ArbotiX Robocontroller can also be custom programmed using the Arduino IDE for autonomous behavior using sensory input, or a variety of other custom applications - your imagination is the limit!
Kit Includes:
- ArbotiX Robocontroller
- 2x MX-28T Dynamixel Actuators
- RX-24F/RX-28 FR07-H101K Hinge Frame Set
- RX-24F/RX-28 FR07-S101K Side Frame Set
- Dynamixel Robot Turret Base & Hardware Kit
- 12v 5amp Power Supply
- FTDI USB Cable
Product Features
- ArbotiX Robocontroller
- Arduino IDE Compatible
- 360 degrees of pan motion
- 180 degrees of tilt motion
- USB, Xbee wireless, Autonomous modes
- Rubber Grip Feet
- USB or Wireless PC Interface
- 32 I/O - 8 as Analog Inputs
- I2C Interface
- Dual Motor Controller
- Open source Firmware
- ISP available for custom programming
ArbotiX Specifications:
The ArbotiX robocontroller is an advanced control solution for ax-12A servo/Bioloid Based robots as well as small-to-medium size robots of any type. It incorporates a powerful AVR microcontroller, XBEE wireless radio, dual motor drivers, and 3-pin servo-style headers for IO.
The ArbotiX robocontroller is specifically designed to control robots built using the Bioloid System and ax-12A servos, although it is also a very high-end solution for powerful rovers. It is not intended to be a drop-in replacement for a CM-5, rather it is intended as a high level development tool for building more sophisticated robots.
- 16MHz AVR microcontroller (ATMEGA644p).
- 2 serial ports, 1 dedicated to Bioloid servo controller, the other to the XBEE radio
- 3 Bioloid ax-12A style ports onboard, plug your ax-12A Servos directly in!
- 32 I/O, 8 of which can function as analog inputs
- Servo style 3-pin headers (gnd, vcc, signal) on all 8 analog inputs, and 8 of the digital IO
- Dual 1A motor drivers, with combined motor/encoder header.
- XBEE radios sold separately. A typical setup will require 2 XBEE radios and an XBEE explorer w/ USB Cable to be able to wirelessly control your robot from your computer.
- 2.8”x2.8” with mounting holes designed to match many Bioloid configurations.
| MX-28 Robot Servo | |
| Holding Torque | 25.5 kg·cm 354 oz·in |
| No-load Speed | 55 RPM |
| Resolution | 0.088° |
| Weight | 72g |
| Size | 50.6 x 35.6 x 35.5 |
| Rotation | 360° |
| Max Current | 1.4 A |
| Protocol | TTL Asynchronous Serial |
- ArbotiX Getting Started Guide
- DYNAMIXEL ID Guide
- Build Check / Test Program
- XBee Configuration Optional
- ArbotiX Commander Setup Optional
- LiPo Battery Guide Optional
- Wireless Handheld Control for the WidowX Robot Turret
- DYNAPose - DYNAMIXEL/ArbotiX Pose Tool
- Untethered Pose Playback with DYNAMIXEL/ArbotiX
- LIDAR Lite Mapping with DYNAMIXEL Servos
-
Turret Gun Coming Soon
Legacy Downloads (For Reference Only)
- Interbotix Robot Turret Manual & Protocol
- ArbotiX Manual & Programming
- Arduino Firmware Sketch & VB .NET Sample Application
- Looking for documentation on the RX-24/RX28? Click here