
Tamiya 89916 4-Speed Crank-Axle Gearbox Kit - Clear
Prices incl. VAT plus shipping costs
Ready to ship today,
Delivery time appr. 1-3 workdays
- Order number: Pololu-1679
- Manufacturer product ID: 1679
Overview
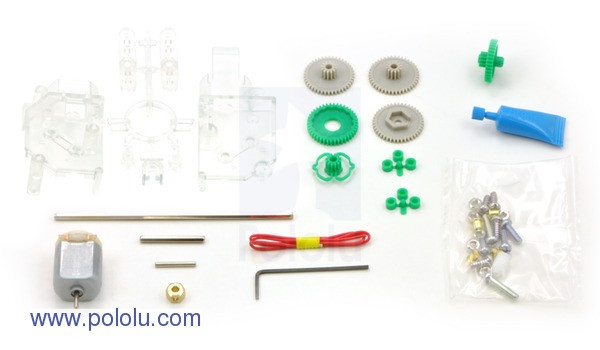
The Tamiya 4-speed crank-axle gearbox has four possible gear ratios, including the highest gear ratio of Tamiya’s gearbox series, 5402:1, as well as 126:1, 441:1, and 1543:1. This gearbox also features a worm gear, which locks the output shaft when the motor is not turning. A clutch gear prevents the gearbox from destroying itself in case the output shaft gets stuck. The kit comes with all parts necessary to build the gearbox in any of the four possible configurations.
Color options
- 70110 4-speed crank-axle gearbox — This gearbox is solid gray and comes packaged in a box.
- 89916 4-speed crank-axle gearbox — This gearbox is clear and comes packaged in plastic bag.
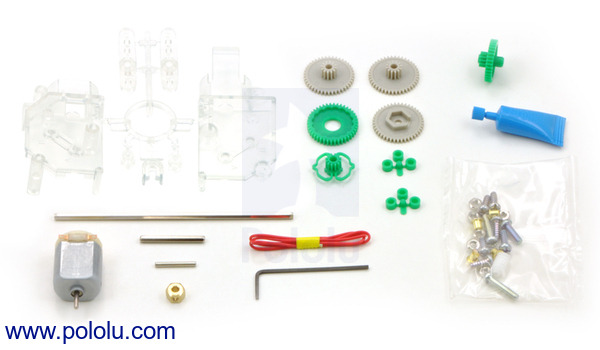 |
| Tamiya 89916 4-speed crank-axle gearbox kit – clear. |
|---|
Complementary products
The output shafts included in this kit are 3 mm hexagonal axles that are 10 cm (about four inches) from tip to tip. The axles work with any of the Tamiya wheels we carry, giving you many options for your robot speed. The low-voltage motors run on 3-6 volts and draw up to a few amps, making them perfect candidates for the Pololu low-voltage dual serial motor controller and the DRV8833 motor driver carrier. Motor overheating can be caused by excessive stalling, even at very low voltages. We recommend that you use stall-detection sensors, or just watch your robot, to make sure that it doesn’t stall for more than a few seconds at a time. For motor specs, see the Mabuchi motor FA-130 (#18100) data sheet(58k pdf).
Note that you can replace the motor in this kit with a lower-current, higher-voltage motor if you want to use this gearbox with controllers such as the qik 2s9v1 dual serial motor controller, TB6612FNG dual motor driver carrier, or Baby Orangutan B-328 robot controller.
To compare all Tamiya gear box kits, see the Tamiya Gearbox Gear Ratio Comparison.
Note: The 4-speed crank-axle gearbox is a kit; assembly is required. To use the kit in robotics projects, you need to connect the motors to your own robot controller.