
Smart Buck click







- Order number: MIKROE-3113
- Manufacturer product ID: MIKROE-3113
The external power supply should be connected to the VIN terminal, with the voltage between 2.5 and 5.5V. Smart Buck click provides two independent output voltage channels, each with the ability to output a regulated voltage in the range between 0.8V up to 5.5V. It is able to provide up to 800mA for the connected load at each of the output terminals. With the ability to programmatically set both voltage values independently while providing reasonably high current, offering 2kbit of non-volatile memory and voltage and current monitoring for both outputs and two input voltage points, Smart Buck is a perfect solution for many different applications, especially well suited for the embedded and IoT applications.
How does it work?
The hearth of Smart Buck click is the MIC2230, a dual synchronous step-down DC/DC regulator, by Microchip. This dual buck converter and voltage regulator offers two independent outputs with their own feedback loops, which allow both outputs to be set to a specific voltage, independently. The dual buck converter works in synchronous PWM mode, whenever the load drains more than 100mA. The operating mode of the converter is switched to so-called Trickle mode when the connected load drains less than 100mA. Although highly efficient for the light loads, this mode has its downsides, such as the slightly increased ripple and increased voltage regulation tolerance. For most cases (when the supplied device enters the standby mode, when the system is suspended, and similar) this is sufficient, but for some critical low current applications, the MIC2230 can be set to always operate in synchronous PWM mode at 2.5MHz, with the output voltage ripple as low as 7mV. To set the PWM mode regardless of the connected load, it is sufficient to pull the FPWM pin of the MIC2230 to a LOW logic level. The FPWM pin is routed to the PWM pin of the mikroBUS™.
Two FB pins of the MIC2230 are used to determine the output voltage at each of the outputs. There is a digitally controlled dual potentiometer IC on the Click board™, labeled as the MCP4661. This IC is a dual 8-bit digital potentiometer with the non-volatile memory and the WiperLock function, from Microchip. The WiperLock function allows permanent storage of the wiper position in the internal EEPROM of the MCP4661 IC. The internal digital potentiometers are connected as the rheostats, acting as the second, variable resistor of the feedback voltage dividers. This allows setting the output voltage, by programming the digital potentiometer values via the I2C interface. The I2C slave address of the MCP4661 IC can be set by the SMD jumpers, labeled as A0 to A2, grouped under the MCP4661 label.
For the power monitoring purposes, Smart Buck click uses the PAC1934, a four-channel DC power and energy monitor with the accumulator, from Microchip. Due to its high degree of integration and an integrated real-time offset and gain compensation circuitry, this device requires only a few sensing resistors to be able to monitor the voltage and sense the current consumption. This IC also contains a high-performance digital section, accessible via the I2C interface, which is used to integrate the measurement results and provide on-chip power calculations, reducing the processing load of the MCU. Single Shot and Continous modes are at disposal, allowing fine-tuning of its functionality. It has four channels of which two are used to monitor current and voltage on the two output terminals. One of the channels is used to monitor a power consumption on the input supply terminal, and finally, one channel monitors the +5V rail of the mikroBUS™. This allows power efficiency of the converter to be easily calculated, as well as the power consumption of the Click board™ as a whole.
The sensing elements which are connected to the PAC1934 are low-value resistors, ranging from 0.05? up to 0.11?. The channel inputs are differential pairs, which are implemented as the Kelvin connection to sensing resistors. Kelvin connection allows very precise measurements, since the voltage drop along the sensor traces due to their resistance, is eliminated. The I2C address of the PAC1934 monitoring IC can also be changed by the onboard SMD jumper, labeled as PAC1934 ADDR SEL. The sampling rate can also be changed by switching the SLOW SAMP jumper to either 0 or 1. Switching it to 1 will enable the slow sampling feature of the PAC1934, enforcing the sample rate of 8sps, regardless of the CTRL register content. The default sampling rate with the default jumper position (SLOW SAMP at 0) is 1024sps.
An EEPROM module is included onboard as an extra feature of the Smart Buck click. The 24C02C, an I2C serial EEPROM from Microchip, with the density of 2kbit is used on the Click board™ to provide storage for any type of data. It has 2kbit of memory, organized in 256 x 8bit words, which translates to 256 bytes of non-volatile memory, which can be used to either store working parameters, or some other application-specific data. The outstanding quality of the module allows up to one million of write/erase cycles and data retention of more than 200 years. All its inputs are protected from noise with the Schmitt triggers, and the module supports fast speed I2C mode, up to 400kHz. The I2C address of this device is also configurable by a set of SMD jumpers labeled as A0 to A2, grouped under the 24C02 label.
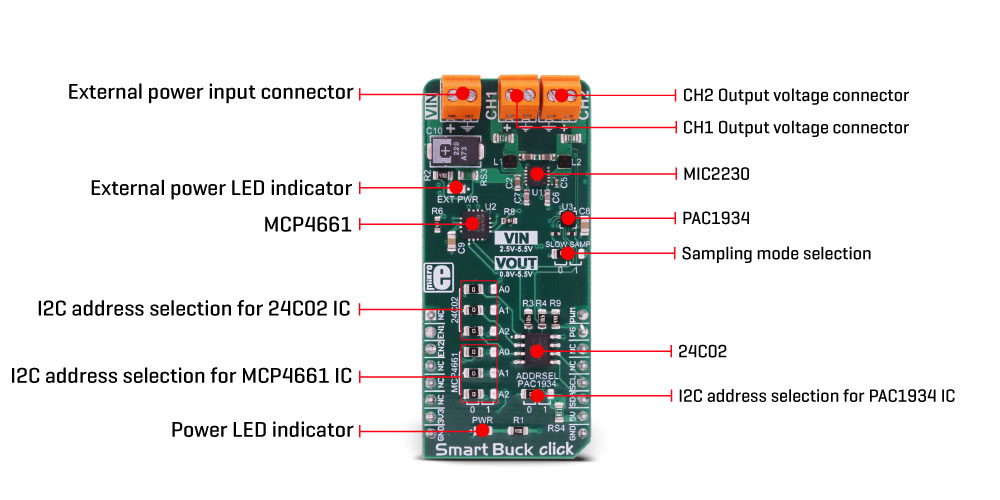
The input/output facilities include two terminals labeled as the CH1 and CH2, which output the step-down voltage in the range of 0.8V up to 5.5V, as previously mentioned. A notice should be taken that an input voltage up to 5.5V should be connected at the input terminal labeled as the VIN, in order to get a voltage at the output. Also, it should be noted that the output voltage should be always programmed to a value lower than the input voltage. The presence of an external power supply at the VIN terminal will be indicated by a red LED, labeled as EXT PWR. The I2C protocol is used for all the sections of Smart Buck click. The required pull-up resistors are included onboard. The Click board™ allows interfacing with 3.3V MCUs, only.
Specifications
| Type | Buck |
| Applications | Smart Buck click can be used to digitally convert input voltage signals up to 3.3V so that the signals can be analyzed by various mathematical models and algorithms on the CPU or MCU. |
| On-board modules | MIC2230, a dual synchronous step-down DC/DC regulator; MCP4661, an 8-bit dual digital potentiometer with non-volatile memory; PAC1934, a four-channel DC power and energy monitor with accumulator; 24C02C, a 2kbit serial EEPROM, all devices from Microchip |
| Key Features | Digitally controlled voltage levels on two independent outputs, low output voltage ripple, reasonably high output current capability, four power monitoring channels by a dedicated monitoring IC, 2kbit of non-volatile memory onboard, and more |
| Interface | I2C |
| Input Voltage | 3.3V,5V |
| Click board size | L (57.15 x 25.4 mm) |
Pinout diagram
This table shows how the pinout on Smart Buck click corresponds to the pinout on the mikroBUS™ socket (the latter shown in the two middle columns).
| Notes | Pin | Pin | Notes | ||||
|---|---|---|---|---|---|---|---|
| NC | 1 | AN | PWM | 16 | PWM | PWM Mode | |
| Chip Enable ch1 | EN1 | 2 | RST | INT | 15 | PG | Power Good INT |
| Chip Enable ch2 | EN2 | 3 | CS | RX | 14 | NC | |
| NC | 4 | SCK | TX | 13 | NC | ||
| NC | 5 | MISO | SCL | 12 | SCL | I2C Clock | |
| NC | 6 | MOSI | SDA | 11 | SDA | I2C Data | |
| Power supply | 3.3V | 7 | 3.3V | 5V | 10 | 5V | Power supply |
| Ground | GND | 8 | GND | GND | 9 | GND | Ground |
Smart Buck click electrical specifications
| Description | Min | Typ | Max | Unit |
|---|---|---|---|---|
| Input voltage (VIN) | 2.5 | - | 5.5 | V |
| Output voltage (VOUT1, VOUT2) | 0.8 | - | 5.5 | V |
| Output Current Limit | - | - | 0.8 | A |
Onboard settings and indicators
| Label | Name | Default | Description |
|---|---|---|---|
| PWR | PWR | - | Power LED indicator |
| EXT PWR | EXT PWR | - | External power indicator |
| JP1 - JP3 | 24C02 (A0 - A2) | Left | 24C02 I2C address selection: left position - I2C Address [3:1] = 0, right position - I2C Address [3:1] = 1 |
| JP4 - JP6 | MCP4661 (A0 - A2) | Left | MCP4661 I2C address selection: left position - I2C Address [3:1] = 0, right position - I2C Address [3:1] = 1 |
| JP7 | PAC1934 | Left | PAC1934 I2C address selection: left position - I2C Address LSB = 0, right position - I2C Address LSB = 1 |
| JP8 | SLOW SAMP | Left | PAC1934 Slow Sampling mode enable: left position 0 (disabled), right position 1 (enabled) |
Onboard connectors
| Label | Name | Description |
|---|---|---|
| VIN | VIN | Input power supply terminal |
| VOUT 1 | VOUT 1 | Output regulated voltage terminal 1 |
| VOUT 2 | VOUT 2 | Output regulated voltage terminal 2 |
Software support
We provide a demo application for Smart Buck click on our Libstock page, as well as a demo application (example), developed using MikroElektronika compilers. The demo can run on all the main MikroElektronika development boards.
Library Description
Library offers a choice to communicate with all devices on Smart Buck click. The library has the ability to control both regulators, both wipers on the potentiometer, EEPROM memory and main sense chip (PAC1934). User can get from driver functions voltage(V), current(mA) and power(mW) data for each activated channel on click. The user also can perform desired configurations, that includes a number of activated channels, data format (unsigned or signed) for each channel, and data selection, which determines a configuration for conversion cycle, one sample data or more samples (averaged data) will be converted in one conversion cycle. For more details check the documentation.
Key functions:
uint8_t smartbuck_writePot( uint8_t regAddr, uint16_t dataIn )- The function writes 16bit data to the Potentiometer register (MCP4661).void smartbuck_enRegulator1( uint8_t state )- Function puts Regulator1 to the desired state.uint8_t smartbuck_setConfigPAC( uint8_t enChann, uint8_t dataFormat, uint8_t dataSel )- The function sets configuration for conversion cycle for PAC1934.void smartbuck_getData( float *voltage, float *current, float *power )- The function reads and calculates the voltage, current and power data from PAC1934 activated channels.
Example description
The application is composed of three sections:
- System Initialization - Initializes peripherals and pins.
- Application Initialization - Initializes I2C interface and performs the click configuration to work in Single-Shot Mode with signed averaged data of 64 samples. CH1 and CH3 are only activated and included in the conversion cycle.
- Application Task - (code snippet) - Sends command to update data registers with newly converted data, waits one second and after that reads new data from data registers. In this way, a user can get voltage, current and power data for activated channels. Results for activated channels logs on UART terminal. Note: If we want to update registers with new converted data, after at least one conversion cycle is done, we should send first REFRESH or REFRESH_V command, before data be read, which will update registers with new values. Also, these commands will update the Control register with new desired configurations.
void applicationTask()
{
smartbuck_sendCmdPAC( _SMARTBUCK_REFRESH_V_CMND );
Delay_ms( 1000 );
smartbuck_getData( &voltageRes[0], ¤tRes[0], &powerRes[0] );
checkByte = 0x80;
index = 0;
for (cnt = 0; cnt < 4; cnt++)
{
if ((enabledChann & checkByte) == 0)
{
channelLog();
FloatToStr( voltageRes[ index ], text );
mikrobus_logWrite( text, _LOG_TEXT );
mikrobus_logWrite( "V", _LOG_LINE );
FloatToStr( currentRes[ index ], text );
mikrobus_logWrite( text, _LOG_TEXT );
mikrobus_logWrite( "mA", _LOG_LINE );
FloatToStr( powerRes[ index ], text );
mikrobus_logWrite( text, _LOG_TEXT );
mikrobus_logWrite( "mW", _LOG_LINE );
index++;
}
checkByte >>= 1;
}
mikrobus_logWrite( "", _LOG_LINE );
} Additional Functions :
- channelLog - Checks which channel is activated (from CH1 to CH4) and logs text on UART.
The full application code, and ready to use projects can be found on our Libstock page.
Other MikroElektronika libraries used in the example:
- Conversions
- I2C
- UART
Additional notes and information
Depending on the development board you are using, you may need USB UART click, USB UART 2 click or RS232 click to connect to your PC, for development systems with no UART to USB interface available on the board. The terminal available in all MikroElektronika compilers, or any other terminal application of your choice, can be used to read the message.
mikroSDK
This click board is supported with mikroSDK - MikroElektronika Software Development Kit. To ensure proper operation of mikroSDK compliant click board demo applications, mikroSDK should be downloaded from the LibStock and installed for the compiler you are using.
- Do you have any questions concerning this product?
- mikroBUS™ Standard specification
- LibStock: mikroSDK
- Smart Buck click example on Libstock
- Smart Buck schematic
- Smart Buck click 2D and 3D files
- MIC2230 datasheet
- MCP4661 datasheet
- 24C02 datasheet
- PAC1934 datasheet
- Click Boards™ Catalog
- Further products by MikroElektronika